






herunterladen
© Semiconductor Components Industries, LLC, 2016
July, 2016 − Rev. 3
1 Publication Order Number:
AND8399/D
AND8399/D
How to Measure Bemf
on the SLA‐pin
Abstract
To enable the possibility to build very accurate stall and
steploss algorithms as also torque adaptive applications,
AMIS−305xx has a Speed and Load Angle (SLA) pin which
outputs a voltage that reflects the Bemf (Back Electro
Magnetic Force) voltage of the motor.
To prevent incorrect use of the SLA-pin, this application
note describes how the motor driver should be operated to
measure the correct Bemf voltage on the SLA-pin.
Introduction
The Bemf is sampled every so called “coil current zero
crossing”. Per coil 2 zero-crossing positions exist per
electrical period, resulting in a total of 4 zero crossings per
electrical period. Or in short, the Bemf voltage can be
measured 4 times per electrical period. Although the Bemf
voltage can
be measured 4 times per electrical period, it does
not mean that it will
be measured 4 times. The Bemf voltage
will only be sampled by the motor driver if a microstep
position is located on the “coil current zero crossing”. Only
then a correct representation (Note 1) of the Bemf voltage
can be measured on the SLA-pin. If no microstep position is
located on the “coil current zero crossing”, an incorrect
value will be measured on the SLA-pin.
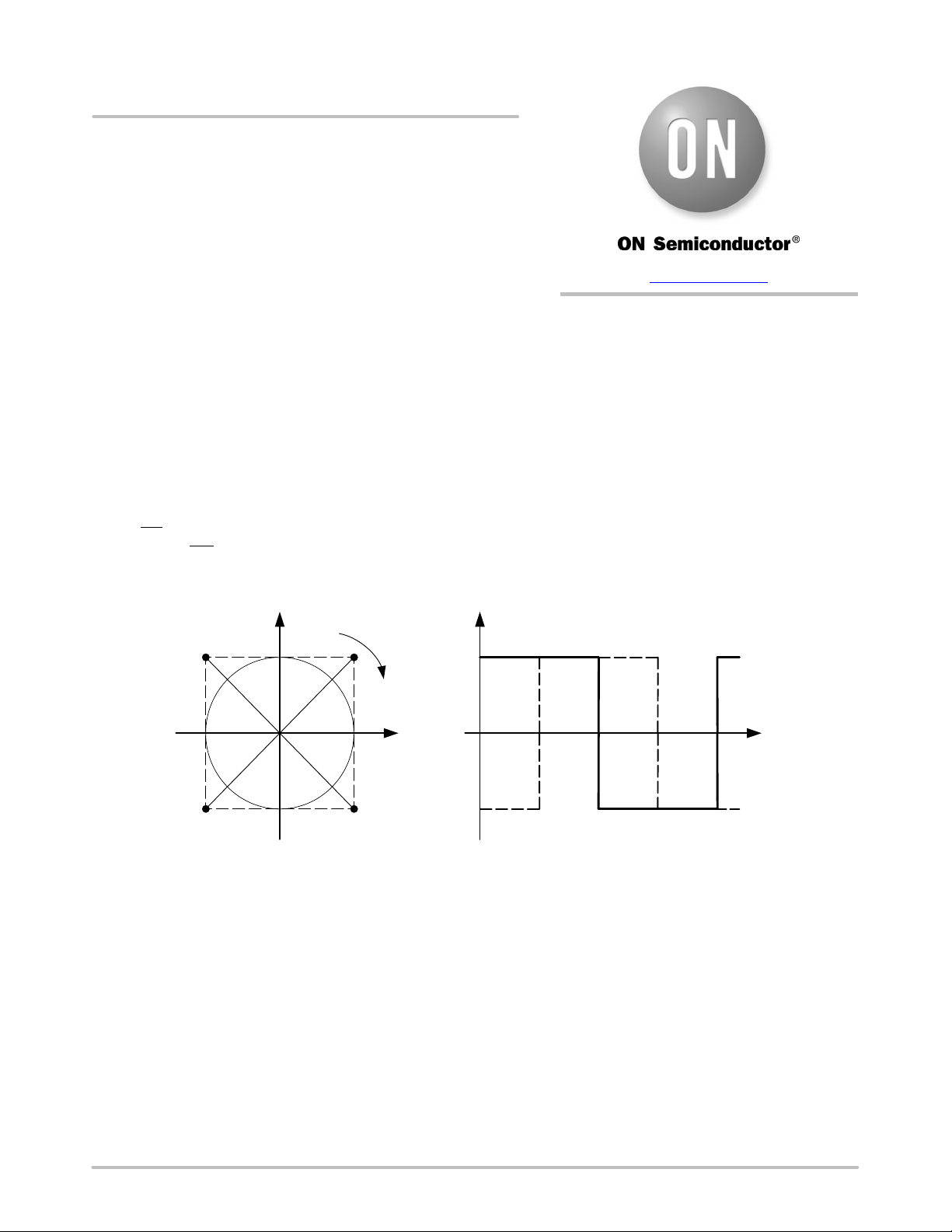
Coil Current Zero Crossings
Next figures display 4 of the in total 7 stepping modes
possible with AMIS−305xx.
Start
t
Figure 1. Full Step Mode
I
Y
I
X
Start
I
coil
I
X
I
Y
1. The voltage measured on the SLA-pin only represents the Bemf voltage. Depending on the SLA Gain setting [1] the SLA voltage will be
equal to 1/2 or 1/4 of the real Bemf voltage.
www.onsemi.com
APPLICATION NOTE
Verzeichnis