







© Semiconductor Components Industries, LLC, 2008
August, 2008 − Rev. 1
1 Publication Order Number:
AND8056/D
AND8056/D
Control Solution using Logic,
Analog Switches, and
Discrete Semiconductor
Devices for Reversing a
One-Phase Motor
INTRODUCTION
In the huge variety of the AC motors, one−phase motors
are an excellent option when only single−phase power is
available to supply electrical energy which motors require to
operate. One of the most common single−phase motors is the
split−phase motor which is used in many applications, such
as pumps, bench drills, compressors, vacuum cleaners,
electrical sewing machines, etc.
In some of these applications it is necessary to reverse the
motor which requires two conditions. The first condition is
the removal of power to the motor in order to stop it. The
second condition is to change the electrical connections
between the main and the start windings.
One of the most common methods to reverse a motor is to
use mechanical relays. This would not be a good solution for
an application in which a fast inversion of its rotation is
needed, since it would be necessary to wait about 5 seconds
before being able to change the motor rotation. Otherwise,
it will operate in the same direction due to the open function
of the centrifugal switch which remains closed until the
motor reaches a low speed.
This application note shows a possible solution to control
a 1/3 HP split−phase motor by taking advantage of different
functions performed by some devices ON Semiconductor
offers in its product portfolio. In addition, the circuit
proposed in this application note eliminates the use of the
centrifugal switch, since its function is being replaced by the
same triacs which are performing the reversing function for
the motor.
DEFINITIONS
Split−Phase Motor
Split−phase motors have two stator windings, a main
winding and a start winding, with their axes displaced 90
electrical degrees in space. The start winding has a higher
resistance−to−reactance ratio than the main winding, so the
two currents are out of phase. Thus, the stator field first
reaches a maximum about the axis of one winding and then
later (about 80 to 85 electrical degrees), reaches a maximum
about the axis of the winding 90 electrical degrees away in
space. The result is a rotating stator field which causes the
motor to start.
At about 75 percent synchronous speed, the start winding
is cut out by a centrifugal switch. The rotational direction of
the motor is determined during its start by the initial fields
arrangement which is generated in the stator by the main and
start windings. This means, as result of the connection
illustrated in Figure 1 between both windings (M2−S1 and
M1−S2), the motor will start with a certain rotational
direction. If reverse direction is desired, the connection
between both windings must be changed as follows: M2−S2
and M1−S1. With this new connection, the fields arrange in
the stator will be changed and, as a result, the rotational
direction will be reversed. The previous statement will work
whenever the connection change is done with the centrifugal
switch closed.
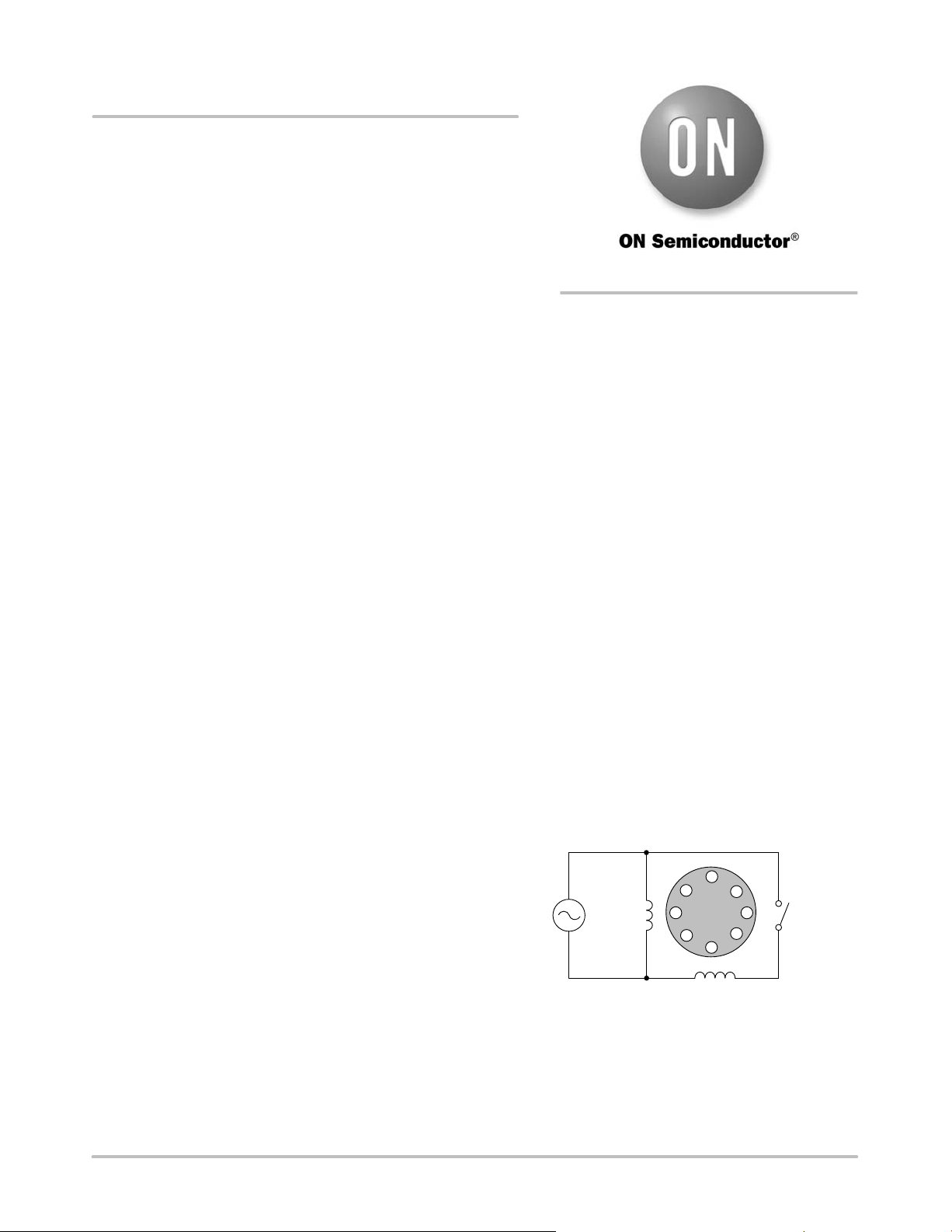
Figure 1 shows a typical representation schematic for a
split−phase motor.
Main
Winding
Start
Winding
S1 S2
M2
M1
Centrifugal
Switch
110 VAC
50/60 Hz
Figure 1.
APPLICATION NOTE
http://onsemi.com
Verzeichnis
- ・ Teilenummerierungssystem on Seite 6
- ・ Blockdiagramm on Seite 3